
A medida que se descubren cada día la adopción de cohetes SLAM y nuevas aplicaciones para la captura de datos móviles, se demuestra el valor de SLAM en empresas de todas las formas y tamaños. La tecnología GeoSLAM continúa rompiendo barreras y el perfil cada vez mayor de los usuarios de SLAM crece cada día.
Moviéndose más allá de la nube de puntos
La familia ZEB representa las formas más móviles y versátiles de capturar datos en cualquier entorno: en interiores, exteriores, subterráneos y en el aire con precisión para adaptarse a muchas aplicaciones, desde cartografía de producción minera, creación de modelos digitales de edificios para levantamientos conforme a obra, cartografía forestal y urbana.
Una vez que una nube de puntos se procesa manualmente y se aplican los ajustes y los parámetros, existen innumerables opciones de qué hacer a continuación con los datos procesados. Desde el uso de los datos en GeoSLAM Draw, hasta la importación en software de modelado BIM o 3D.
El auge de la automatización
Según un informe de McKinsey, el 45% de las actividades pagas actuales se pueden automatizar con la tecnología actual, por eso nos complace compartir que después de 2 años de desarrollo extenso, estamos lanzando GeoSLAM Connect.
GeoSLAM Connect
Construido sobre LiDAR OS, GeoSLAM Connect es una plataforma de procesamiento automatizado, que utiliza flujos de trabajo basados en secuencias de comandos para procesar sus datos como lo desee. Ha sido desarrollado en LiDAR OS, el nuevo sistema operativo de software de GeoSLAM, diseñado pensando en la automatización.
Conecte su ZEB y sus datos .geoslam aparecerán como una nube de puntos completamente procesada unos minutos más tarde, dentro de un visor 3D, donde puede colorear, filtrar y ver fotos, notas y notas de voz tomadas desde la aplicación GeoSLAM.
Visor 3D 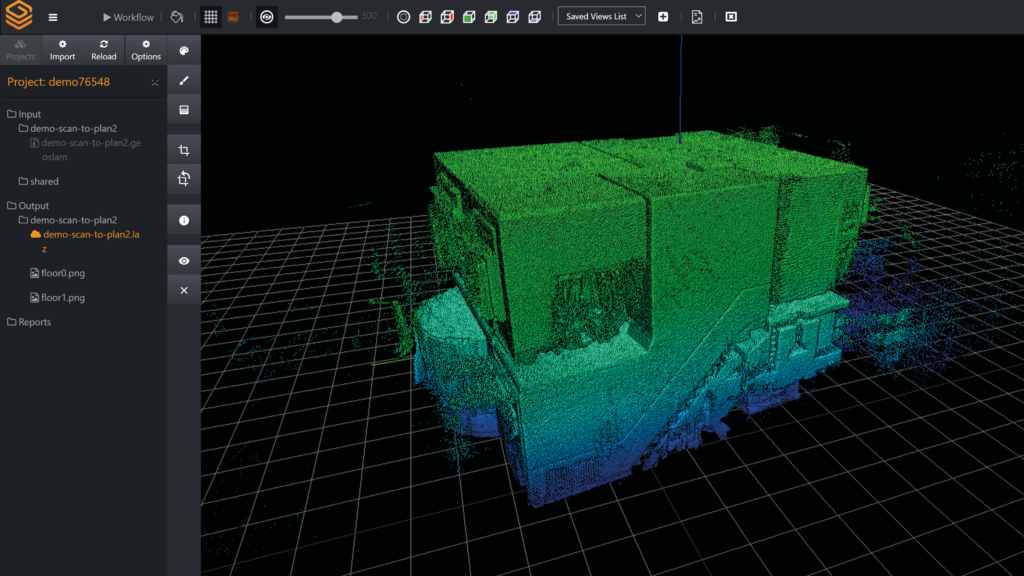
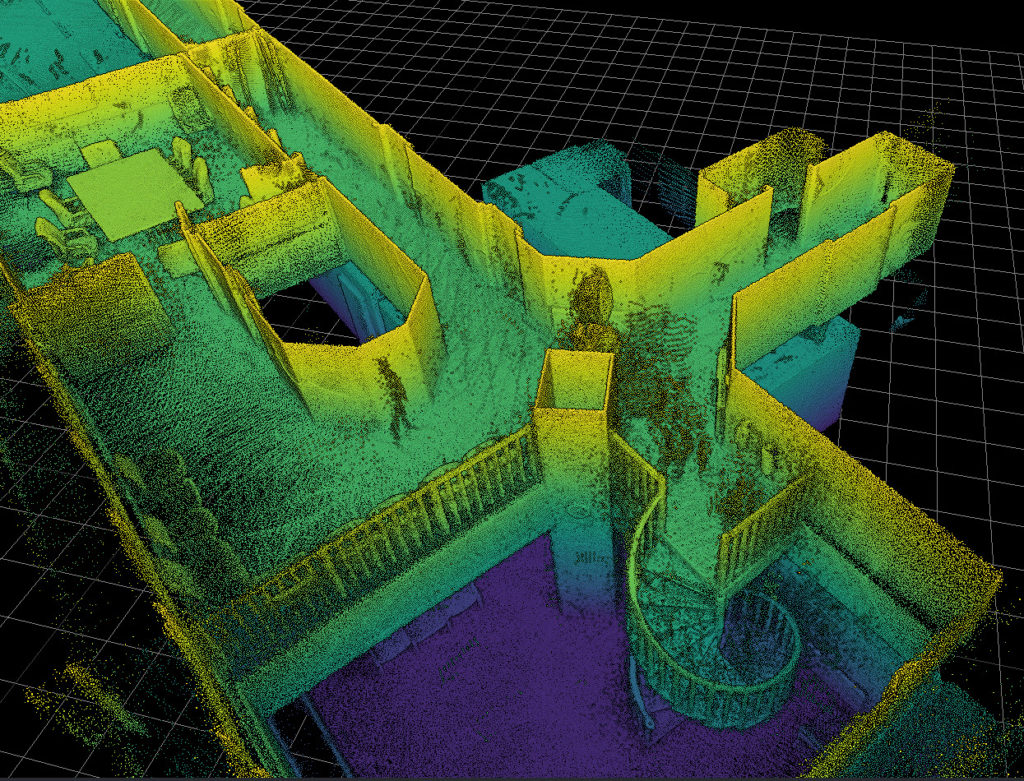
El visor Connect 3D permite al usuario crear y administrar proyectos, seleccionar el flujo de trabajo de procesamiento predeterminado, crear informes y visualizar datos. Los resultados de SLAM generados a partir de flujos de trabajo automatizados se pueden ver en el visor 3D para una fácil visualización e interpretación.
Las nubes de puntos se pueden colorear por tiempo, elevación, RGB o un solo color definido por el usuario. Los datos capturados con la aplicación de teléfono inteligente GeoSLAM (imágenes y notas) también se pueden mostrar en el visor 3D como una serie de “puntos de acceso” que el usuario puede seleccionar para ver los datos de la aplicación capturados en la ubicación del punto de acceso.
Aplicación de teléfono 
Por supuesto, no estaría completo sin una nueva aplicación de teléfono brillante. Así que, junto con Connect, también lanzaremos eso. Una aplicación de teléfono inteligente (para Android) que permite a los usuarios capturar fotos, agregar notas escritas o de voz y seleccionar de una lista de etiquetas personalizadas, mientras capturan datos del escáner ZEB. Luego, los datos del teléfono inteligente se procesan y se ubican DENTRO de los datos de la nube de puntos, lo que proporciona un conjunto adicional de datos para que los usuarios los interpreten.




